Matteo Calabria
Master's student in Industrial Automation Engineering. Currently working on humanoid robotics, reinforcement learning, and VLMs/VLAs for embodied intelligence.
Experience
Research Intern
Designed and implemented a deep learning-driven control system within the ACTIVA Project to optimize intravenous anesthesia delivery. Significantly advancing patient safety and anesthesia precision.
Education
Double Degree in Robotics and Autonomous Systems
2025 - PresentInterdisciplinary curriculum covering mechatronics, sensor fusion, reinforcement learning, and human-robot interaction.
M.Sc. in Industrial Automation Engineering
2024 - PresentSpecializing in robotics and control sytems applications for industrial automation.
B.Sc. in Industrial Automation Engineering
2021 - 2024Focused on robotics control and automation fundamentals.
Summer Schools
Imperial Robotics Summer School
Jul 2025Foundational and specialized lectures covering kinematics, robot learning, and control, plus a week-long project implementing an RL policy for the Unitree Go2 robot with multiple locomotion strategies.

PhD Summer School: Reinforcement Learning and LLMs for Robotics
Jul 2025Practice-oriented sessions on LLM fundamentals and RL algorithms, including HPC deployment workflows and CloudGripper robot control via LLM instructions.
Featured Projects
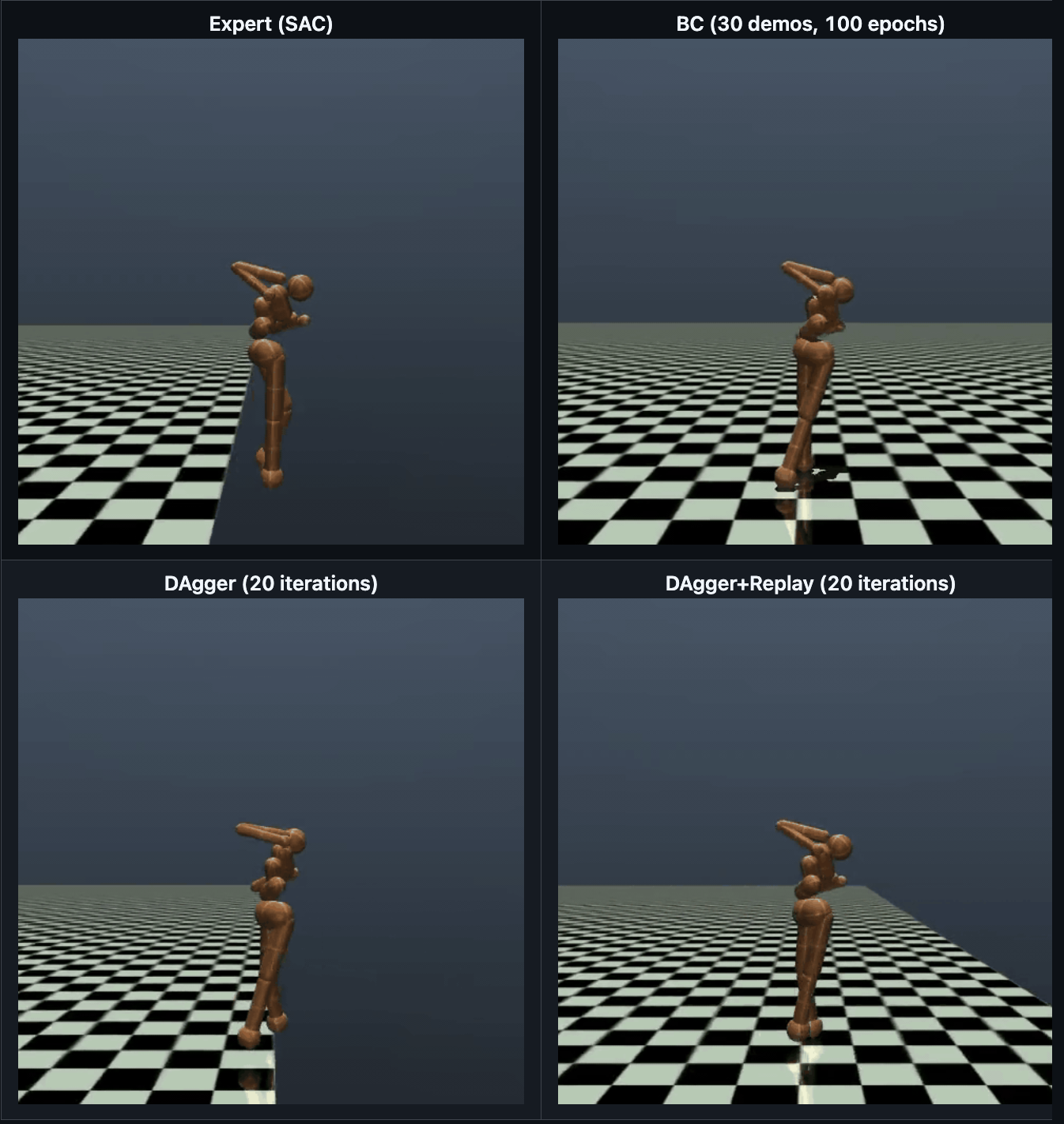
Human-Robot Interaction Playground
Dec 2025Developed an imitation learning framework implementing Behavioral Cloning, DAgger, and DAgger+Replay. Benchmarked against RL baselines (PPO, SAC) on MuJoCo environments.
Learning Robot Manipulation from Demonstrations
Sep 2025Assembled and 3D printed two open-source SO-101 robotic arms, recorded synchronized kinematic and video data, and trained ACT and smolVLA policies on the collected dataset.
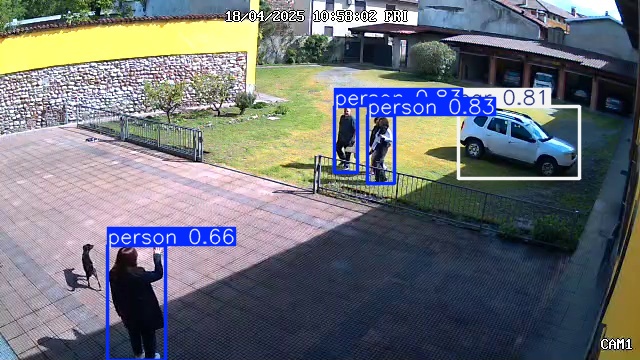
Reolink-DetectAI
Jun 2025Custom home security system using OpenCV and YOLOv8 to monitor RTSP camera streams, perform object detection, and send email alerts with detected images.
Downhill Event Detection
May 2025Developed a Machine Learning system to detect jumps and turns in downhill mountain biking using high-frequency IMU and fork sensor data. Took part in a field measurement campaign, collecting and processing 300k+ sensor samples.

Automatic Control of Anesthesia
Sep 2024Bachelor's ThesisDesigned a deep learning-driven control system within the ACTIVA Project to predict BIS values and optimize intravenous anesthesia delivery, overcoming traditional closed-loop limitations.

Volunteering
Mentee
CurrentMentorshipLead The Future Mentorship
Among the few Italian students selected to be mentees for LeadTheFuture, a leading mentorship non-profit for STEM students, with an acceptance rate below 15%.
Learn More →Fellow
CurrentFellowshipEuroTech Federation
Federating the best builders of today to create the Europe of tomorrow
Learn More →Honors & Awards
ISSA PULIRE Hackathon 2025
🥇 1st PlaceAI-Orchestrator: A real-time web app for managing stadium cleaning operations using AI. Built in just 6 hours, combining computer vision, forecasting, and smart task allocation.

ABB RoboCup 2025
🥈 2nd PlaceParticipated with University of Brescia team in a national-level robotics competition. Programmed virtual robotic cells and deployed pick-and-place tasks on real industrial robots.
